Neighbourhood-Insensitive Point Cloud Normal Estimation Network
(BMVC 2020 Oral Presentation)
Abstract
We introduce a novel self-attention-based normal estimation network that is able to focus softly on relevant points and adjust the softness by learning a temperature parameter, making it able to work naturally and effectively within a large neighbourhood range. As a result, our model outperforms all existing normal estimation algorithms by a large margin, achieving 94.1% accuracy in comparison with the previous state of the art of 91.2%, with a 25x smaller model and 12x faster inference time. We also use point-to-plane Iterative Closest Point (ICP) as an application case to show that our normal estimations lead to faster convergence than normal estimations from other methods, without manually fine-tuning neighbourhood range parameters.
Results
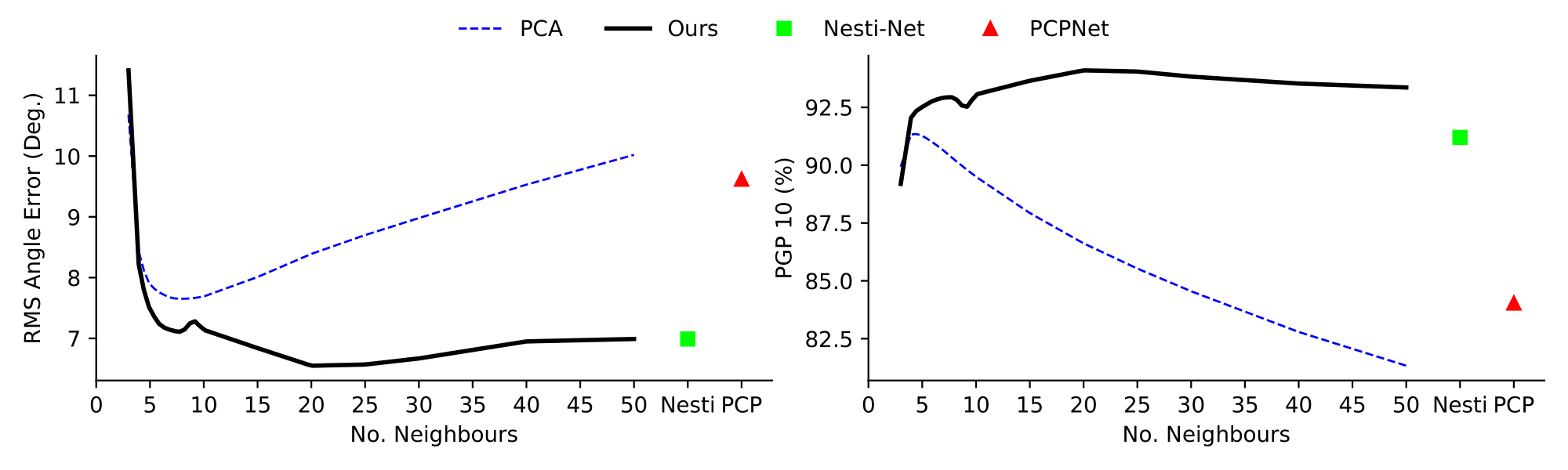
Our model outperforms PCA by a large margin and most importantly, the performance of our method does not degrade as the number of neighbours increases.
Attention Weight Visualisation
From the attention map over 5 and 10 neighbours, (a) and (b), we can see that the network pays more attention to neighbours that are close to the patch centre and ignores points farther than 8th neighbours. This agrees with the PCA performance in the figure above. From the attention map over 25 and 50 neighbours, (c) and (d), we observe that the network pays extra attention to points at the right-end in a row. These are points far from the patch centre.
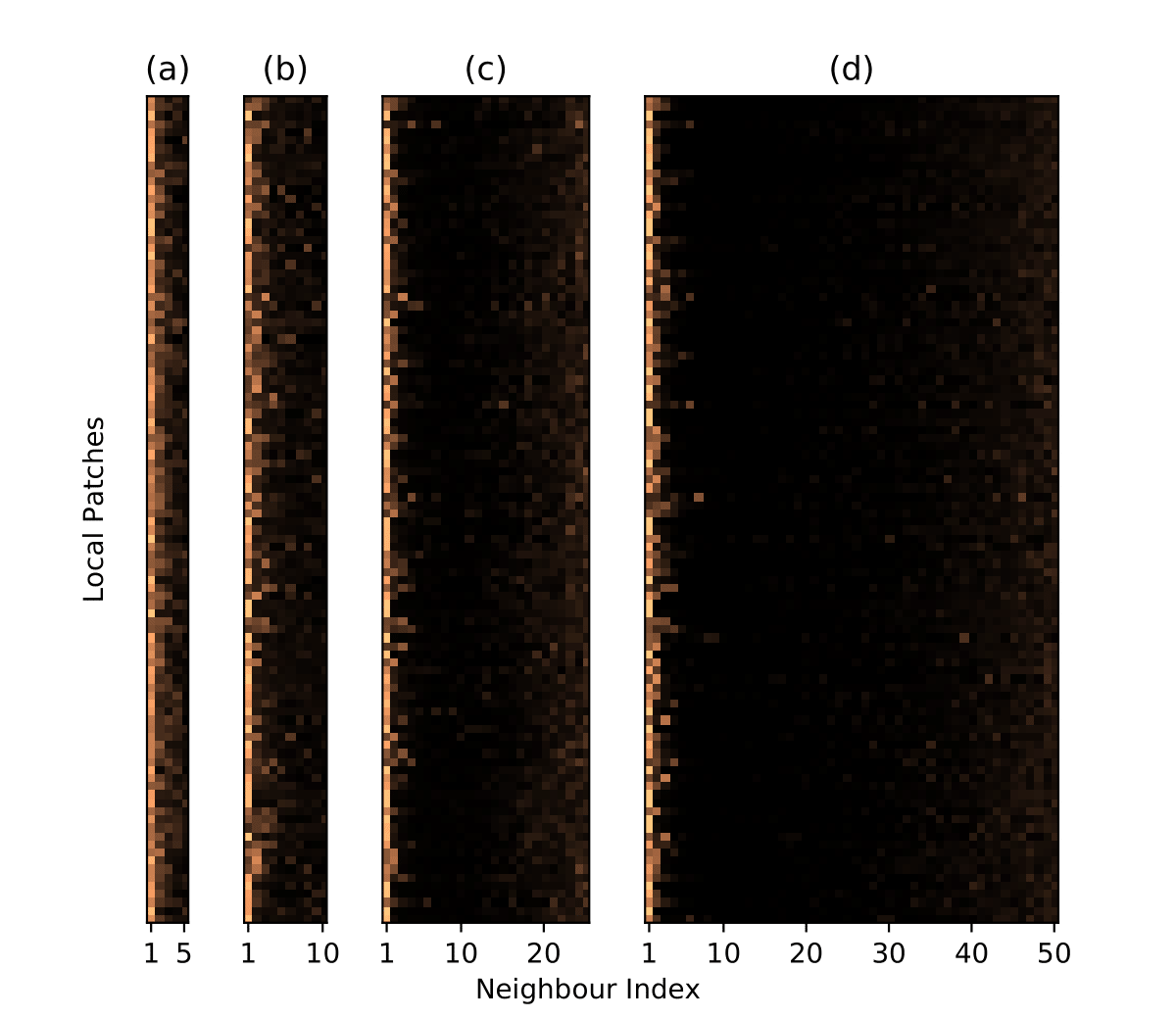
To illustrate this better, we show the attention weights predicted by our network in 3D. These attention weights visualisations suggest that the network learns to identify geometric properties around the current point using points from larger scales, by inspecting, for example, whether the patch contains a sharp edge or a corner. Therefore, our network maintains a relatively stable performance despite different numbers of neighbours by focusing on relevant points.
Acknowledgement
The authors would like to thank Min Chen, Tengda Han, Shuda Li, Tim Yuqing Tang and Shangzhe Wu for insightful discussions and proofreading.
BibTeX
@inproceedings{wang2020ninormal,
title={Neighbourhood-Insensitive Point Cloud Normal Estimation Network},
author={Wang, Zirui and Prisacariu, Victor Adrian},
booktitle={BMVC},
year={2020}
}
Reference
- Paul Guerrero, Yanir Kleiman, Maks Ovsjanikov, and Niloy J. Mitra. PCPNet: Learning local shape properties from raw point clouds. Computer Graphics Forum, 2018.
- Yizhak Ben-Shabat, Michael Lindenbaum, and Anath Fischer. Nesti-net: Normal estimation for unstructured 3d point clouds using convolutional neural networks. In CVPR, 2019.